I love me a bio-inspired robot that pulls off challenging feats by taking cues from the natural world. University of California, Berkeley (UCB) researchers have now shown off the one-legged Salto bot mimic the way squirrels leap effortlessly between precarious branches and stick the landing on the very first attempt.
Since 2016, Salto has played a big role in helping engineers at UCB figure out ways to enhance robotic mobility for specialized applications. The one-legged bot can jump to a height of over three feet (over a meter) – thrice its own height – and even ricochet off a wall.
For Salto’s latest trick, the hopping bot leapt onto a perilous branch and balanced without toppling over.
Watch the little robot do its thing in the clip below.
Berkeley researchers designed this robot to jump like a squirrel
So how do you make a robot land on a branch with one foot? It starts with extensive research on how squirrels jump. Some members of the UCB team presented a paper on this biomechanical analysis, which appeared in the Journal of Experimental Biology last month.
As it turns out, when squirrels land on a branch, they direct the force of landing through their shoulder joint, and then apply braking force with their legs to avoid falling forwards or backwards.
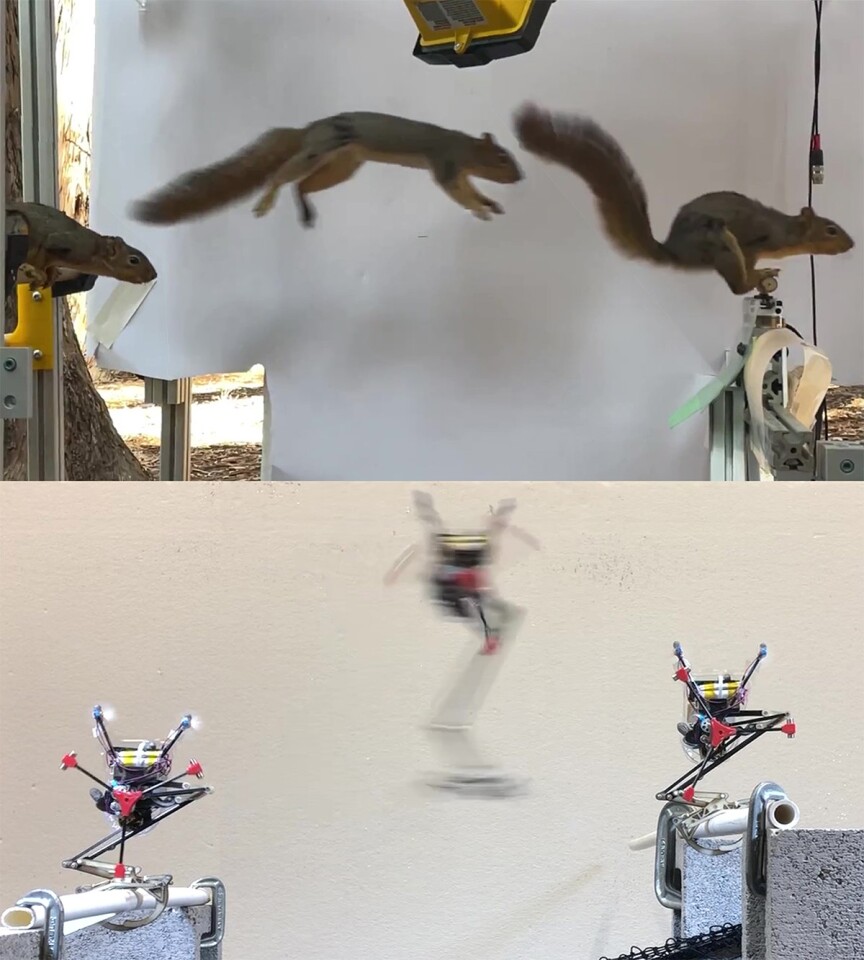
Sebastian Lee (top) and Justin Yim (bottom) / UC Berkeley
Next, the researchers went to work enhancing Salto’s capabilities. The bot already had a motorized flywheel to help it balance; adding a way to reverse the motor enabled Salto to brake when it landed on a branch. The team also added adjustable leg forces to help it compensate for over- or under-shooting when it landed, in addition to the flywheel’s effect.
With that, Salto and other robots that use this tech could potentially aid in search-and-rescue operations by navigating nimbly through disaster areas, help inspect infrastructure, and even explore low-gravity celestial bodies.
To that end, Justin Yim, who co-authored the paper on jumping robots that appeared in Science Robotics, is developing a one-legged bot that could survey Enceladus, a moon of Saturn, where a single leap could carry the little machine the length of a football field.
Source: UC Berkeley